[Brute-Force][FLANN]特征匹配¶
计算好特征点以及描述符之后,就可以通过特征匹配器计算两个图像之间的匹配了。OpenCV提供了两个特征匹配算法:
Brute-Force MatcherFLANN Matcher
Brute-Force¶
执行步骤如下:
- 利用特征提取算法计算关键点和描述符
- 创建特征匹配器,选择距离计算方法以及计算方式
- 计算匹配对并进行筛选
- 绘制匹配对
计算关键点和描述符¶
使用SIFT算子实现
import cv2 as cv
import matplotlib.pyplot as plt
def sift_compute():
img1 = cv.imread('box.png', cv.IMREAD_GRAYSCALE) # queryImage
img2 = cv.imread('box_in_scene.png', cv.IMREAD_GRAYSCALE) # trainImage
# Initiate SIFT detector
sift = cv.xfeatures2d.SIFT_create()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
return img1, img2, kp1, kp2, des1, des2
使用了两个图像进行匹配,一个称之为查询图像(目标),另一个称之为训练图像(包含目标)
创建特征匹配器¶
使用函数cv.BFMatcher创建Brute-Force特征匹配器,可配置两个属性:
normType:距离计算方式,包括了NORM_L1, NORM_L2(默认), NORM_HAMMING, NORM_HAMMING2。对于SIFT算子,推荐使用L1/L2 normcrossCheck:默认为False。如果为True,则匹配的关键点对(i,j)符合以下特性:对训练图像的第i个关键点而言,和查询图像的第j个关键点之间的距离是最短的,反之同样成立
bf = cv.BFMatcher(cv.NORM_L2, crossCheck=True)
计算匹配对并进行筛选¶
BF提供了两种匹配函数:
match:从查询集中查找每个描述符的最佳匹配项knnMatch:从查询集中查找前k个最佳匹配项
Note:如果使用knnMatch,那么不能在创建BF对象时设置属性crossCheck为True
match¶
使用match函数得到一列DMatch对象,表示最佳匹配对,其属性如下:
DMatch.distance:两个描述符之间的距离,越小越好DMatch.trainIdx:训练图像的描述符下标DMatch.queryIdx:查询图像的描述符下标DMatch.imgIdx:训练图像下标
通过匹配对之间的距离进行排序,可以得到最佳的匹配对
matches = sorted(matches, key=lambda x: x.distance)
knnMatch¶
使用knnMatch函数得到一列对象,其中每个对象包含k个匹配对(类型为DMatch),其按描述符距离升序排序
通过k个匹配对之间的距离可以进一步搜索出好的匹配对
matches = bf.knnMatch(des1, des2, k=2)
# Apply ratio test
good = []
for m, n in matches:
# 当最小的两个距离的比率超过一定时,判断为好的点
if m.distance < ratio * n.distance:
good.append([m])
绘制匹配对¶
使用函数drawMatches和drawMatchesKnn分别训练由函数match和knnMatch生成的匹配对
完整代码¶
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
def sift_compute():
img1 = cv.imread('box.png', cv.IMREAD_GRAYSCALE) # queryImage
img2 = cv.imread('box_in_scene.png', cv.IMREAD_GRAYSCALE) # trainImage
# Initiate SIFT detector
sift = cv.xfeatures2d.SIFT_create()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
return img1, img2, kp1, kp2, des1, des2
def sift_match(img1, img2, kp1, kp2, des1, des2):
# create BFMatcher object
bf = cv.BFMatcher(cv.NORM_L2, crossCheck=True)
# Match descriptors.
matches = bf.match(des1, des2)
# Sort them in the order of their distance.
matches = sorted(matches, key=lambda x: x.distance)
print(len(matches))
# Draw first 10 matches.
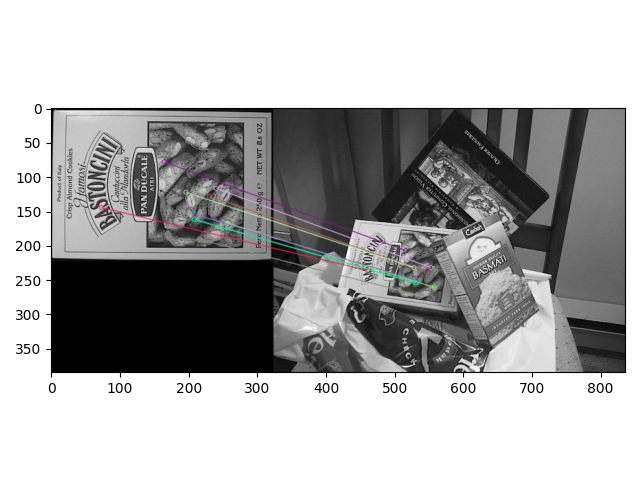
img3 = cv.drawMatches(img1, kp1, img2, kp2, matches[:10], None, flags=cv.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
plt.imshow(img3), plt.show()
def sift_match_knn(img1, img2, kp1, kp2, des1, des2, ratio=0.5):
# BFMatcher with default params
bf = cv.BFMatcher(cv.NORM_L2)
matches = bf.knnMatch(des1, des2, k=2)
# Apply ratio test
good = []
for m, n in matches:
# 当最小的两个距离的比率超过一定时,判断为好的点
if m.distance < ratio * n.distance:
good.append([m])
good = sorted(good, key=lambda x: x[0].distance)
# cv.drawMatchesKnn expects list of lists as matches.
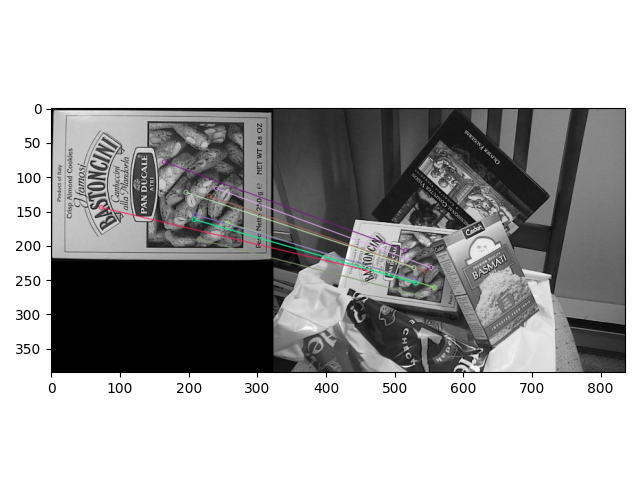
img3 = cv.drawMatchesKnn(img1, kp1, img2, kp2, good[:10], None, flags=cv.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
plt.imshow(img3), plt.show()
if __name__ == '__main__':
img1, img2, kp1, kp2, des1, des2 = sift_compute()
# sift_match(img1, img2, kp1, kp2, des1, des2)
sift_match_knn(img1, img2, kp1, kp2, des1, des2)
使用match函数,绘制前10个最佳匹配对
使用knnMatch函数,设置k=2,判断同一描述符的匹配对距离比大于0.5的是好的匹配结果,再按匹配距离进行排序,绘制前10个最佳
FLANN¶
。。。